

Single-Zone Force Sensing Resistors
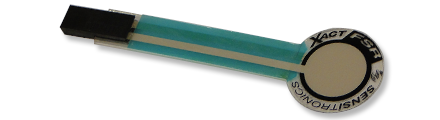
Thin, flexible, and cost effective, single-zone FSRs provide accurate measurement of static or dynamic force from a single input.
MatrixArrays
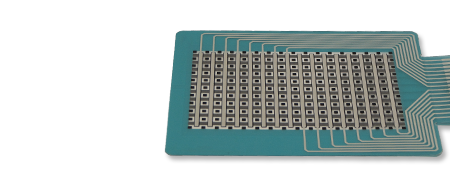
Mapping force & position over a continous area, MatrixArrays are used in a wide range of multi-touch capable designs.
XactFSR
Create your own high accuracy / low drift custom force sensors - for less than the price of off-the-shelf FSRs!
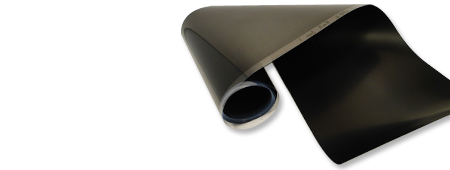
XYZ Pads

Resistive XYZ Pads (AKA Digitizer Pads) are used in trackpad type applications. XYZ Pads measure 3 Dimensions (X/Y position + force) from a single input.
Discrete Arrays

These arrays are single-zone FSRs grouped on a single custom substrate. Applications include game controllers, keyboards, & musical instruments, etc.
Force Sensing Linear Potentiometers
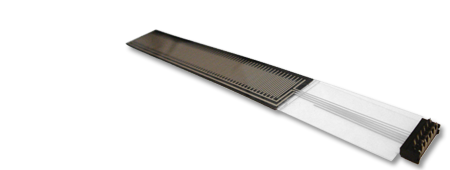
FSLPs are used to measure position along a single axis, as well as applied force. They're commonly used in electronic musical instruments, and a variety of touch-sensitive controls.